

La précision manque souvent dans les systèmes de mouvement. Les erreurs de position coûtent du temps et de l’argent.
Une solution existe : comprendre le servo moteur et son fonctionnement. Ce savoir permet d’améliorer la précision et la fiabilité des montages.
Le texte suit un chemin clair, du principe aux applications concrètes. Il ouvre sur des cas d’atelier pratiques et des pistes pour bien choisir.
Voici l’essentiel à retenir pour maîtriser un servo moteur et optimiser le contrôle de position.
- Boucle de rétroaction : cœur du système pour corriger en temps réel.
- Encodeur / capteur de position : garantit la précision et évite les pertes de pas.
- Commande PID : règle la dynamique pour une réponse stable et rapide.
- Choix moteur : évaluer couple, vitesse et inertie pour réduire le TCO.
- Intégration : régulateurs modernes supportent EtherCAT et surveillance d’état.
Avec ces points, il devient plus simple de choisir et d’entretenir un servomoteur pour des résultats durables.
Servomoteur : définition et principe de fonctionnement pour une précision optimale
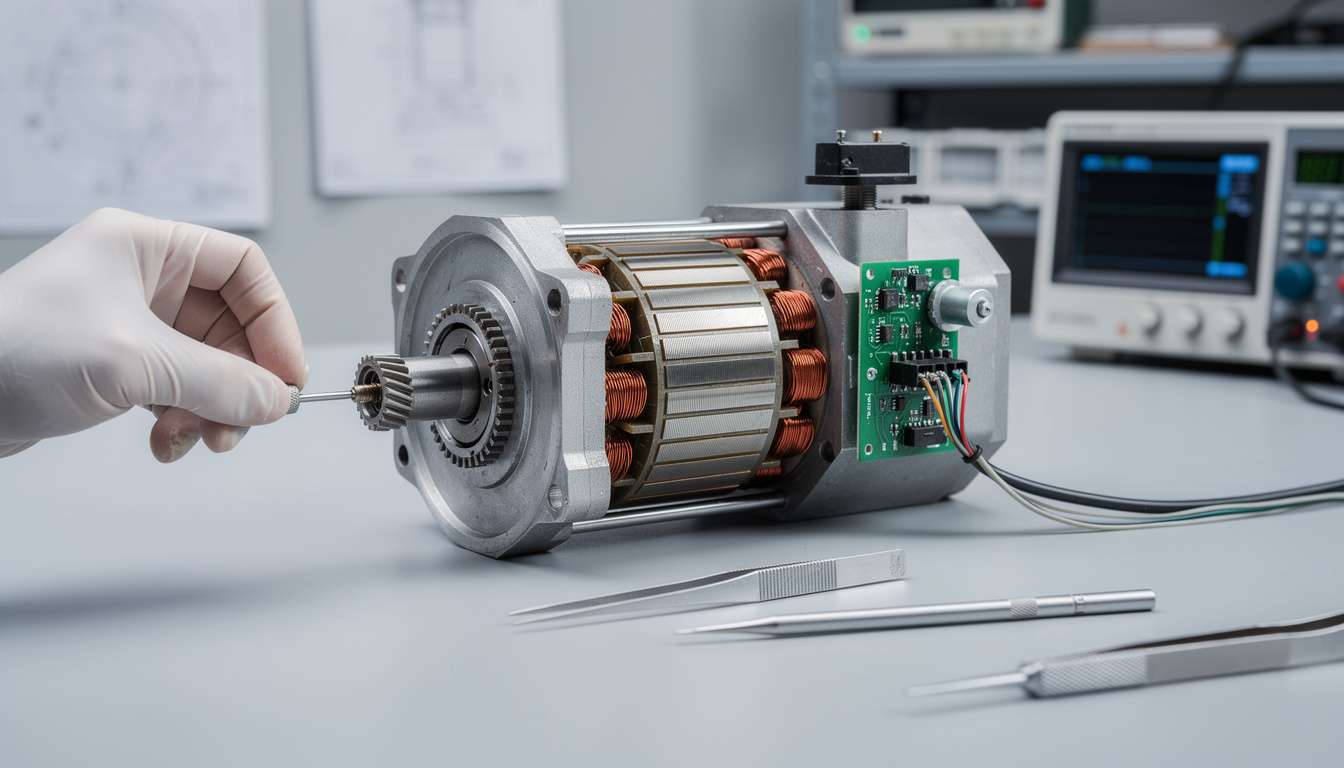
Un servomoteur est un moteur électrique doté d’un système d’asservissement. Il contrôle la position, la vitesse et le couple avec précision. La base réside dans une boucle de rétroaction qui compare consigne et réalité.
Le contrôleur envoie une consigne au moteur. Un capteur de position tel qu’un encodeur renvoie la position réelle. Le contrôleur corrige alors l’erreur pour atteindre la cible.
Cette régulation continue fait la force du servo. Contrairement à un moteur ordinaire, il peut maintenir une position malgré une charge externe. C’est crucial pour la robotique et le CNC.
La commande se fait souvent via une modulation PWM ou par des signaux numériques. Un régulateur opère la conversion des consignes en courants moteurs. Les algorithmes de commande PID ajustent la réponse dynamique et la stabilité.
Le rôle de l’encodeur est déterminant pour la précision. Il fournit un retour angulaire ou absolu en continu. Les encodeurs absolus évitent la remise à zéro après une coupure d’alimentation.
En atelier, l’usage d’un servo permet d’éviter des retouches répétées. Un bras robotisé peut reprendre exactement la même trajectoire. L’atelier fictif d’Arcy-Autos illustre bien ces gains lors d’opérations de fraisage répétitives.
Enfin, la densité de puissance et l’efficacité énergétique comptent. Les servomoteurs sans balais (AC synchrones) offrent une grande puissance et peu d’entretien. Ils conviennent aux exigences modernes de la mécatronique.
Phrase-clé : la boucle de rétroaction transforme un moteur en système de mouvement précis et fiable.
Différences techniques entre servo moteur et moteur ordinaire
À première vue, un moteur électrique simple et un servo moteur semblent similaires. La différence capitale est la présence d’une boucle de rétroaction dans le servo. Cette boucle permet le contrôle de position et la correction automatique.
Les moteurs ordinaires fonctionnent généralement en boucle ouverte. Ils tournent tant qu’ils reçoivent de la puissance. Ils conviennent pour des usages où la précision n’est pas critique, comme des pompes ou ventilateurs.
Le servo, au contraire, sait s’arrêter et tenir une position avec exactitude. Il réagit aux perturbations et adapte son couple. C’est idéal pour la robotique, les machines CNC et l’automatisation exigeante.
Sur le plan coût, les moteurs classiques sont moins chers à l’achat et simples à monter. Les servos exigent régulateur, encodeur et paramétrage. Cet investissement se rentabilise par la réduction des déchets et des retouches.
Le tableau ci-dessous compare les points essentiels pour un choix pragmatique.
| Critère | Moteur ordinaire | Servo moteur |
|---|---|---|
| Contrôle | Boucle ouverte | Boucle de rétroaction |
| Précision | Faible | Élevée |
| Complexité | Faible | Élevée |
| Coût initial | Basse | Plus élevé |
| Applications typiques | Pompes, ventilateurs | Robotique, CNC |
Exemple concret : une imprimante 3D peut fonctionner avec un moteur pas à pas. Un robot de manutention préfèrera un servo moteur pour éviter les pertes de pas. Le choix dépend donc de la dynamique et de la charge attendue.
Phrase-clé : le bon choix repose sur l’analyse du besoin en couple, en vitesse et en inertie.
Types de servomoteurs et applications pratiques en mécatronique
Les variantes courantes incluent les servos positionnels, les servos à rotation continue et les servos linéaires. Chacune répond à des besoins spécifiques de mouvement. Le choix s’appuie sur la tâche, la précision et l’espace disponible.
Les servos positionnels pivotent sur un angle défini et se bloquent. Ils servent pour les articuations de robot ou les gouvernes d’avion télécommandé. Les servos à rotation continue tournent sans fin et pilotent des roues ou des convoyeurs.
Les servos linéaires convertissent le mouvement rotatif en translation. Ils sont utiles sur des tables CNC ou des mécanismes d’indexage. Leur avantage est le contrôle fin de la course linéaire sans conversion externe complexe.
Exemples d’applications industrielles : bras robotisés, machines d’emballage et machines CNC. Dans l’industrie médicale, les robots chirurgicaux et les pompes à perfusion exigent une grande fiabilité. Dans l’automobile, ils pilotent des vannes et systèmes d’assistance.
Liste pratique de critères pour sélectionner un servo :
- Couple de pointe et continu requis pour la charge.
- Vitesse nominale et plage de régulation pour la dynamique.
- Moment d’inertie de la charge et compatibilité mécanique.
- Type de capteur : absolu ou incrémental selon la nécessité.
- Interfaces numériques : EtherCAT, PROFINET, CANopen ou autres.
Pour illustrer, l’atelier d’Arcy-Autos a adapté un servomoteur pour une table de fraisage. Le gain de précision a réduit les retouches de 20 %. Ce type de retour d’expérience guide le dimensionnement futur.
Phrase-clé : choisir le bon type de servomoteur garantit une intégration efficace en mécatronique.
Calculateur de couple pour servomoteur
Comprendre le fonctionnement d’un servo moteur pour une meilleure précision. Entrez la puissance (W), la vitesse (rpm) et le rendement (%).
Afficher la formule et le calcul détaillé
Formule utilisée :
T (Nm) = (Putile * 60) / (2π * n)
où Putile = Pentrante * (rendement / 100)
Détail du calcul : —
Intégration, régulateur, interfaces et commande PID pour le contrôle de position
L’intégration d’un servomoteur nécessite un régulateur adapté. Le régulateur convertit les consignes PLC en courants moteurs précis. Les régulateurs modernes proposent des auto-ajustements et des profils de mouvement.
La commande PID reste un pilier pour régler la réponse. Le terme PID représente Proportionnel, Intégral et Dérivé. Chaque composante influence respectivement l’erreur instantanée, l’élimination de l’erreur résiduelle et l’anticipation des changements.
Les interfaces numériques sont cruciales pour l’industrie 4.0. Des protocoles temps réel comme EtherCAT, PROFINET ou EtherNet/IP permettent une synchronisation fine. Ils facilitent aussi la surveillance d’état et la maintenance prédictive.
Les entraînements intégrés réduisent le câblage et l’espace en armoire. Ils peuvent diminuer les temps d’installation jusqu’à 30 %. Pour des machines modulaires, cette compacité est un vrai atout.
Sur le plan EMC et mécanique, l’alignement et le blindage sont essentiels. Un mauvais alignement accroît l’usure des paliers et des réducteurs. Respecter les recommandations du fabricant préserve la durée de vie.
Phrase-clé : un réglage PID précis et une intégration soignée assurent un contrôle de position stable et rapide.
Maintenance, coût total de possession et études de cas à l’atelier
Le TCO dépasse le prix d’achat. Il inclut consommation énergétique, maintenance et temps d’arrêt. Un servomoteur efficace réduit la consommation et les interventions.
La durée de vie typique varie entre 10 000 et 20 000 heures selon usage et entretien. Une surcharge ou un refroidissement insuffisant raccourcit cette durée. Un programme d’inspection régulière prolonge la fiabilité.
Les servos sans balais demandent moins d’entretien et offrent une puissance élevée. Les réducteurs planétaires sans jeu augmentent la précision mais doivent être choisis avec soin. Le choix influe aussi sur la qualité finale du produit.
Cas d’atelier : une rénovation de 205 GTI nécessita la commande d’un servo pour un dispositif d’indexage sur fraiseuse. La nouvelle configuration a réduit les temps de cycle de 15 %. Cette anecdote montre que la robotique n’est pas réservée aux grandes usines.
Quant au budget, les servos vont de petites unités à environ 10 € pour le modélisme à plusieurs milliers d’euros pour l’industrie. Un servo industriel de 1-2 kW se situe souvent entre 800 € et 1 500 € avec régulateur. La décision doit intégrer l’économie sur le long terme.
Enfin, les tendances pointent vers la compacité, la densité de puissance et l’intelligence embarquée. Les servomoteurs connectés offrent des diagnostics et optimisent la maintenance. Voilà une piste à suivre pour rester compétitif en 2026.
Phrase-clé : investir dans un servomoteur adapté et entretenu réduit le TCO et améliore la productivité de l’atelier.